Los bucles de control PID pueden ser muy útiles en la automatización y en muchas aplicaciones diferentes. Pueden utilizarse para controlar un alimentador utilizado en un sistema de pérdida de peso o de ganancia de peso, o para controlar bombas que necesitan funcionar hasta un punto de ajuste. También pueden utilizarse en aplicaciones de movimiento con diferentes objetivos de posición, manteniendo la posición frente a fuerzas externas. Para ilustrar la flexibilidad funcional de los lazos de control PID, describiré una implementación de PID en paralelo. Este ejemplo se ilustra a continuación con un diagrama de bloques de este algoritmo de control. 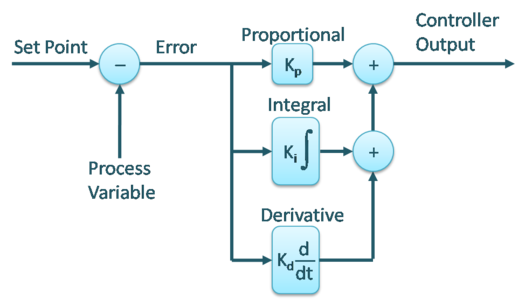
 Ajuste de los bucles PID
Ajuste de los bucles PID
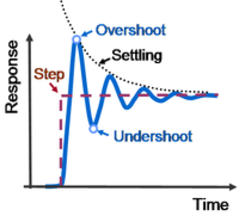
Hay un par de maneras de afinar los bucles PID. Si se tiene un modelo del sistema, se pueden calcular los valores de ganancia necesarios, lo que facilitaría el proceso de ajuste. También existe el método de Zeigler Nichols que utiliza una ganancia global del sistema y que luego le da ecuaciones para calcular las ganancias específicas de KP, KI y KD. Sin un modelo de sistema o alguna de la información necesaria para usar el método Zeigler Nichols, su única opción es observar el cambio de la variable del proceso y hacer pequeños cambios en las ganancias basados en sus observaciones. Algunas de las mejores prácticas cuando se sintoniza un bucle PID de esta manera son comenzar con KP para obtener la respuesta necesaria del sistema. Una vez que tenga la respuesta deseada, pase a KI, y KD, corrija cualquier error de estado estable y el exceso de punto de ajuste.